复习-图🖼
图的遍历
BFS
需要借助一个队列来非递归实现
DFS
递归实现
最小生成树(MST)-贪心思想
Prim算法
从某一个顶点开始构建生成树;每次将代价最小的新顶点纳入生成树,直到所有顶点都纳入为止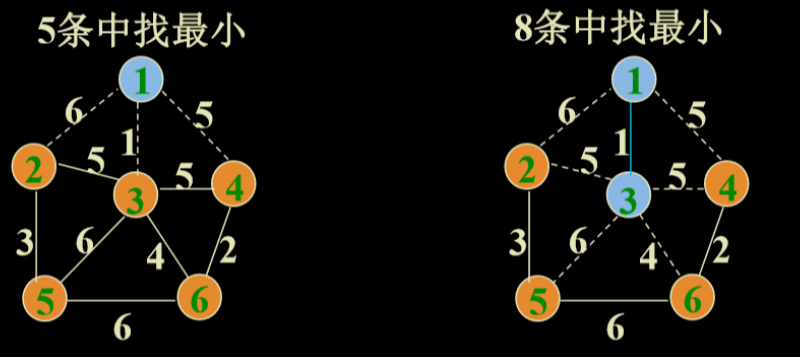


- 时间复杂度 $O(\vert V^2 \vert )$
- 适合用于边稠密图
Kruskal算法
每次选择一条权值最小的边,将这条边的两头连通(原本已经连通的就不选),直到所有结点都连通

- 时间复杂度 $O(\vert E \vert \log_2 \vert E \vert )$
- 适合用于边稀疏图
最短路径问题
- 单源最短路径问题
- 每对顶点间的最短路径

BFS算法求单源最短路径
Dijkstra算法求带非负权值图单源最短路径
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38/**
path数组记录从源节点这一节点到目标结点路径上的倒数第二个节点,以此类推
dist数组记录到该点的当前已知最短路径长度
s记录该点是否已经加入已选点集中
图用邻接矩阵表示
**/
public int[] shortestpath(int v){
//v为源点数值
int n = this.numOfVertex;
// 初始化
for( int i=0; i<n; i++){
dist[i]=Edge[v][i]; //dist初始化
s[i]=0; //s为check数组,记录每个顶点是否被访问过
if( i!=v && dist[i]< MAXNUM ) path[i]=v;
else path[i]=-1;
}
s[v]=1; //源点已访问
dist[v]=0; //源点到自身距离为0
for( i=0; i<n-1; i++){
float min=MAXNUM;
int u = v;
// 找出最近的点集
for( int j=0; j<n; j++)
if( !s[j] && dist[j]<min ) { //找未被访问过且最小的顶点
u=j;
min=dist[j];
}
s[u]=1; //把这个最近的点纳入已知点集中
// 更新距离
for ( int w=0; w<n; w++)
if( !s[w] && Edge[u][w] < MAXNUM && dist[u] + Edge[u][w] < dist[w]){ //未被访问过 && u和w间有边 && 从u到w比之前到w的路要短
// 只需要考虑未被加入点集中的点
dist[w]=dist[u]+Edge[u][w];
path[w]=u;
}
}
return path;
}Bellman-Ford算法
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19public int[] BellmanFord(int v){ //v是源点
int n = this.numOfVertex;
for(int i=0;i<n;i++){
dist[i]=Edge[v][i]; //初始化dist
if(i!=v&&dist[i]<MAXNUM)
path[i]=v;
else path[i]=-1;
}
for (int k=2;k<n;k++) // 事实上可以不做满这么多次,当你发现距离数组已经不变化的时候就可以不做了
for(int u=0;u<n;u++)
if(u!=v) //若u不是源点
for(i=0;i<n;i++)
if (Edge[i][u] >0 && Edge[i][u]<MAXNUM && dist[u]>dist[i]+Edge[i][u]){
//若边不为负权 && i与u之间有边 && 走i-u到u的距离比u原先的dist短
dist[u]=dist[i]+Edge[i][u];
path[u]=i;
}
return path;
}
Floyed算法-动态规划思想
不能解决带有“负权回路”的图
三层暴力for循环遍历
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Rashawn's Blog!